Biography
I completed my undergraduate studies at Durham University in 2022, specializing in Mechanical Engineering. My dissertation project applied the Stochastic Newmark Method to analyze earthquake impacts on skyscrapers and large structures, building my expertise in structural dynamics and computational analysis.
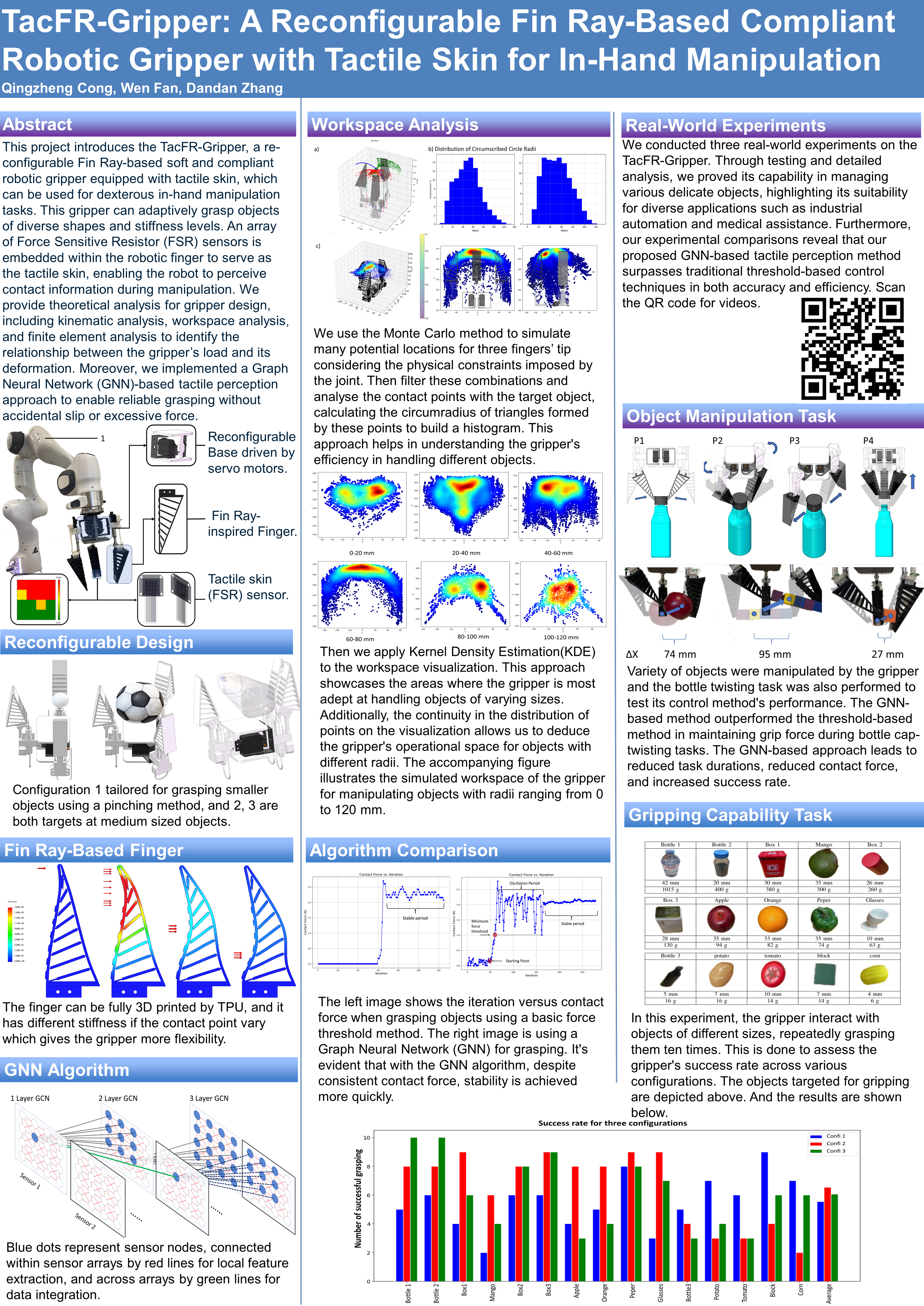
In 2023, I earned an MSc in Biorobotics from the University of Bristol, where my research involved developing a soft, reconfigurable robotic hand for advanced in-hand manipulation. This project enhanced my skills and interest in bio-inspired robotics and sophisticated manipulation techniques.
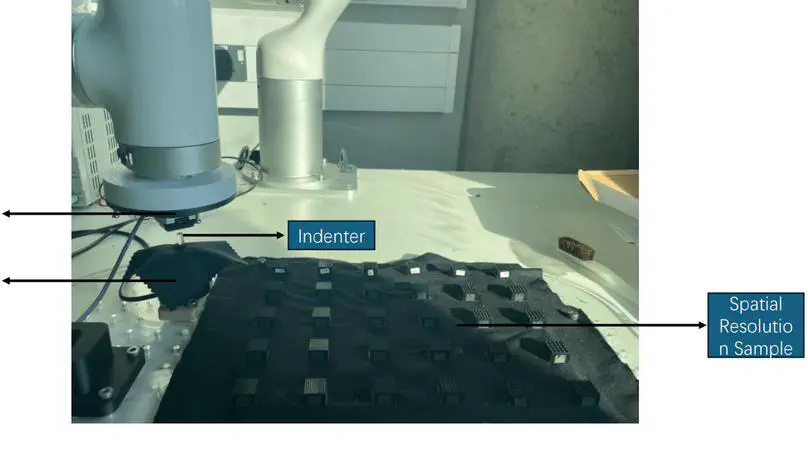
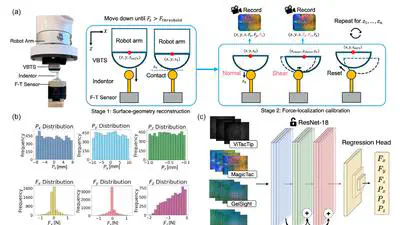
From 2023 to 2025, I worked as a Research Assistant at the Multi-Scale Embodied Intelligence Lab at Imperial College London. I gained extensive hands-on experience in tactile sensing and robotic manipulation, including the fabrication and performance evaluation of Vision-Based Tactile Sensors (VBTS), data acquisition and analysis, and flexible PCB design for robotic sensor integration. From December 2025 to March 2026, I worked as an Electronics Intern at TG0, focusing on practical electronics development and deployment for robotics-related applications.
- Artificial Intelligence
- Mechanical Design Simulation
- Tactile Manipulation
- Gaming
PhD Student in Soft Robotics, 2025-Present
Queen Mary University of London
MSc in Biorobotics, 2022-2023
University of Bristol
BEng in Mechanical Engineering, 2019-2022
Durham University
Research Assistant, 2023-2025
Electronics Intern, 2025.12-2026.03
Projects

Paper
My Poster
Skills
Contact
Feel free to reach out via email if you’re interested in discussing and collaborating on academic topics within my research focus and experience.
- qcong@qmul.ac.uk
- Mile End Rd, Bethnal Green, London, E1 4NS