TacEva
 Experimental Set up
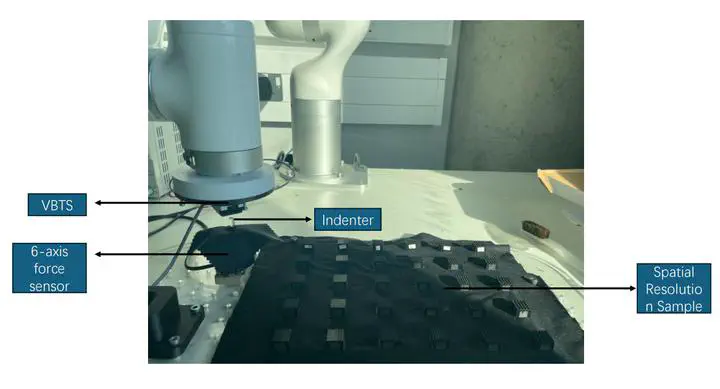
Experimental Set upTaceva provides an end-to-end workflow for vision-based tactile sensors (VBTS), from data collection to quantitative evaluation. For data collection, we developed a low-cost and compact force-displacement measuring platform by modifying an Easythreed X2 3D printer, enabling repeatable calibration experiments across different tactile sensor designs.
On top of this platform, Taceva defines performance metrics tailored to practical robotic manipulation scenarios and implements a structured benchmarking pipeline for each metric. By applying this workflow to multiple VBTSs with different sensing mechanisms and structures, we obtain consistent quantitative indicators of multifunctional performance. This supports both sensor pre-selection and performance-guided optimization for task-specific applications.
从清正
PhD Student
非常喜欢小B宰治在人间逼格里的一句话:铁汁,先穿袜子再穿鞋,先当孙子再当爷。Bro, put on your socks before your shoes; be the grandson before you become the grandpa.