MagicGripper: A Mini-MagicTac Integrated Gripper Enabling Multimodal Perception in Contact-Rich Manipulation
Abstract
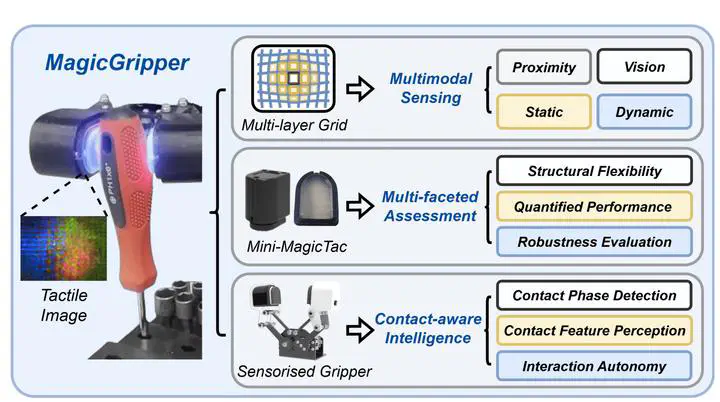
Contact-rich robotic manipulation in unstructured environments demands reliable multimodal perception. Here, we present MagicGripper, a multimodal robotic gripper built around mini-MagicTac, a compact variant of the MagicTac sensor. MiniMagicTac embeds multi-layer grid structures in a 3D-printed elastomer, enabling visual, proximity, and tactile sensing in a gripper-compatible form factor. In this paper, we introduce the design and multimodal perception capabilities of mini-MagicTac, as well as two algorithmic frameworks for proximity and contact detection. Experimental evaluations show that mini-MagicTac achieves high spatial resolution, accurate contact localisation, and robust force estimation under mechanical and manufacturing variations. Autonomous grasping trials further validate MagicGripper’s reliable multimodal perception and adaptability to complex manipulation scenarios. These results demonstrate MagicGripper as a compact and versatile platform for embodied intelligence in contact-rich environments.